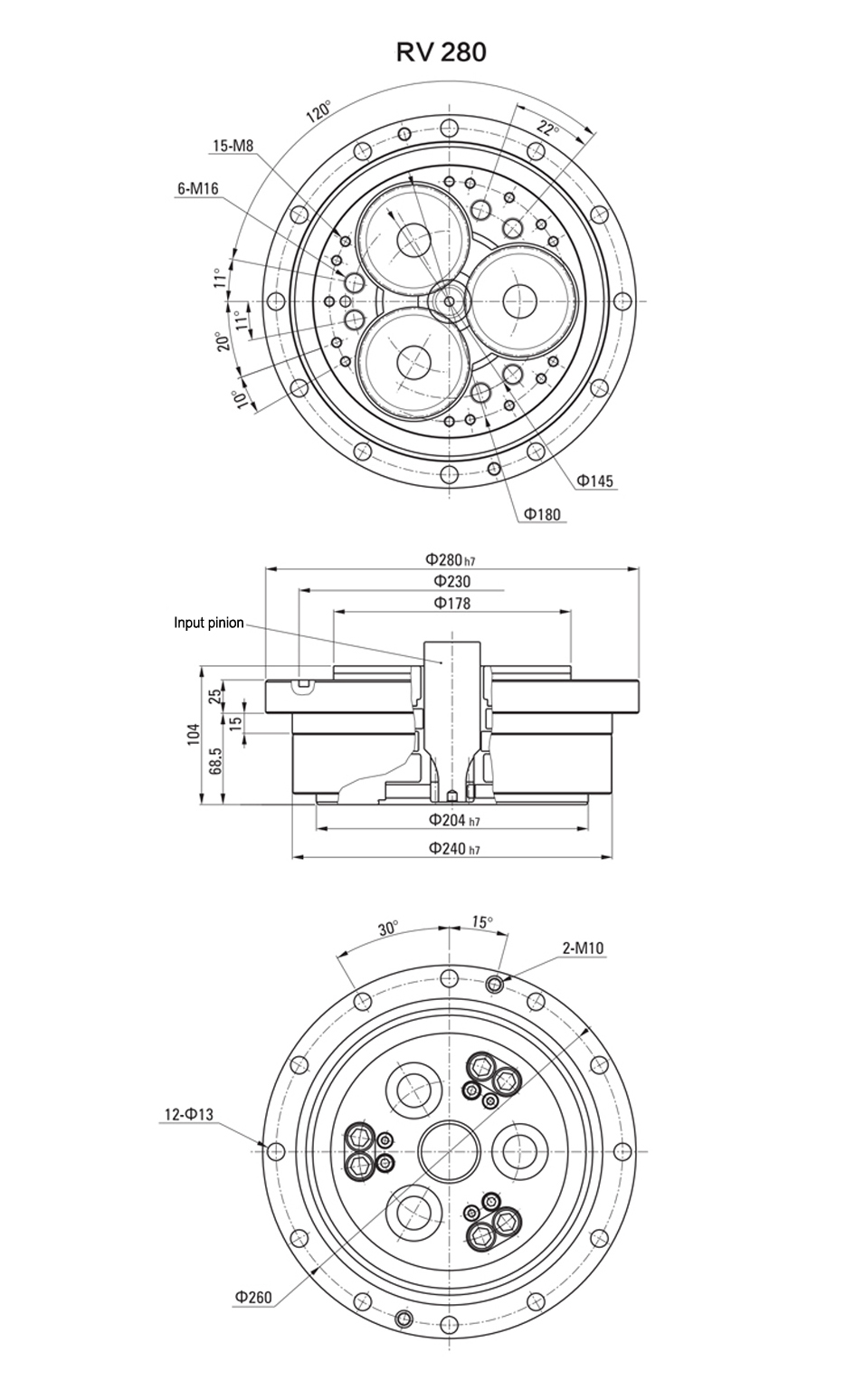
ռոբոտների ճշգրիտ փոխանցման միավոր

Չափերը ՝ RV-25N RV-42N RV-60N RV-80N RV-100N RV-125N RV-160N RV-380N RV-500N RV-700N
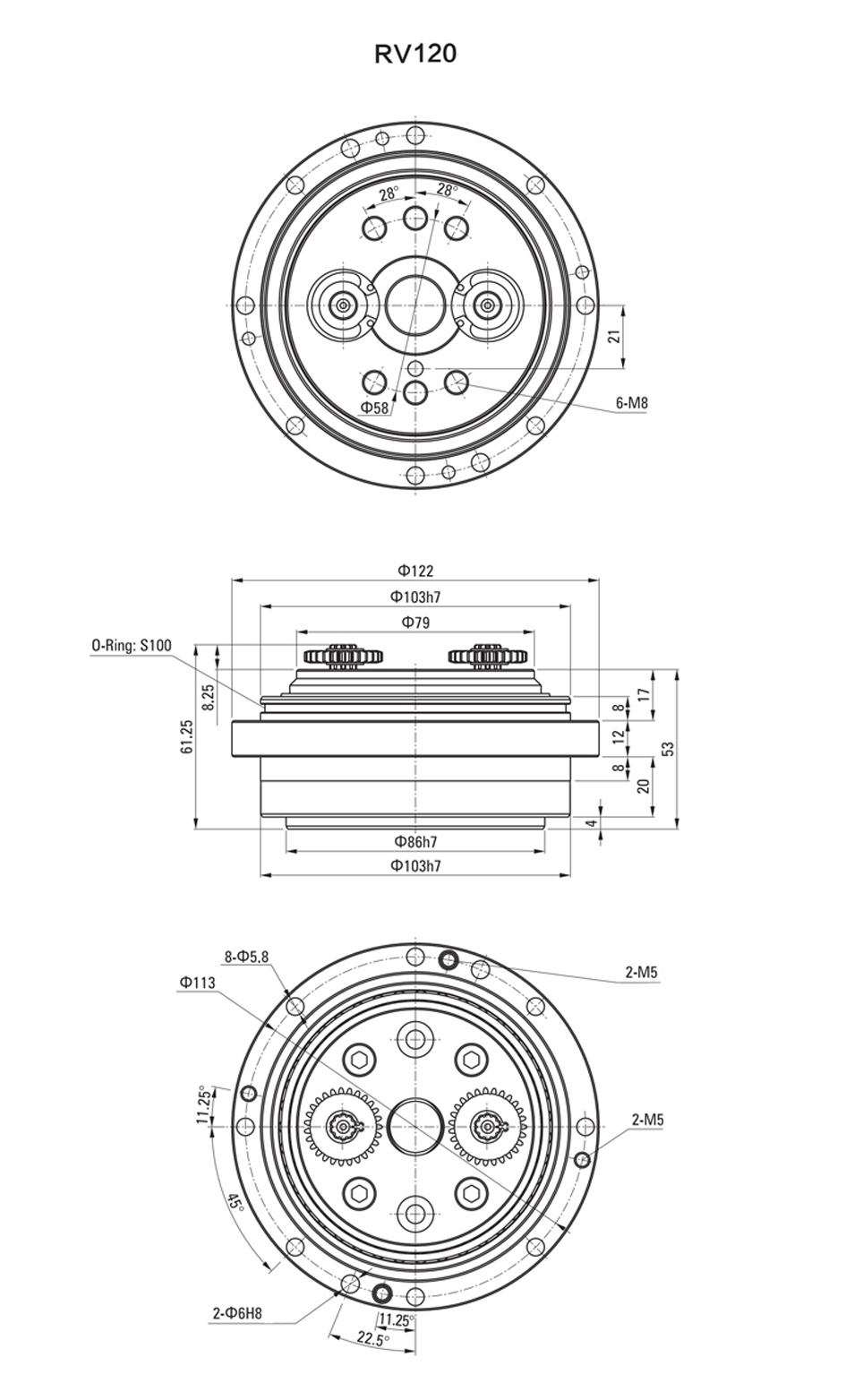
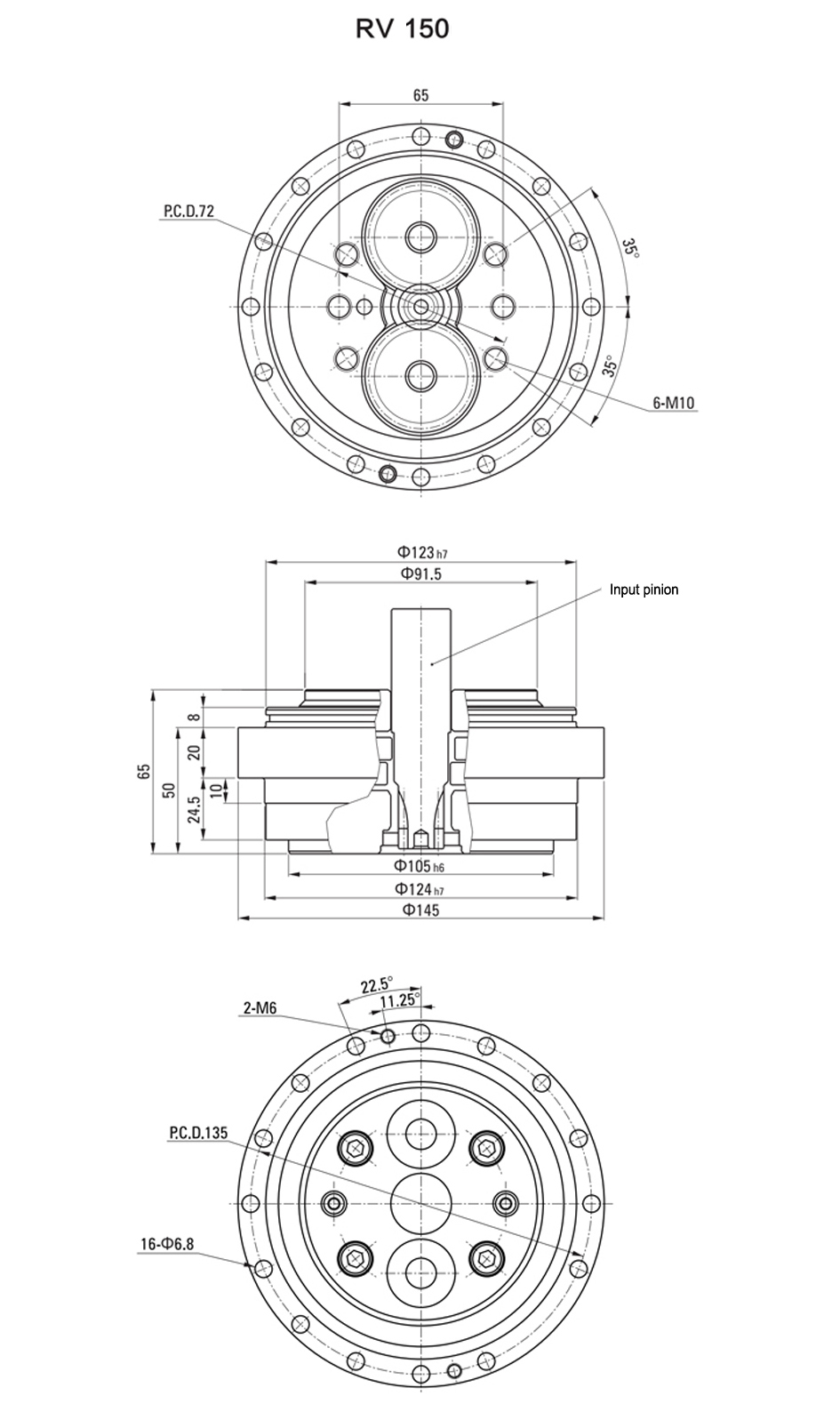
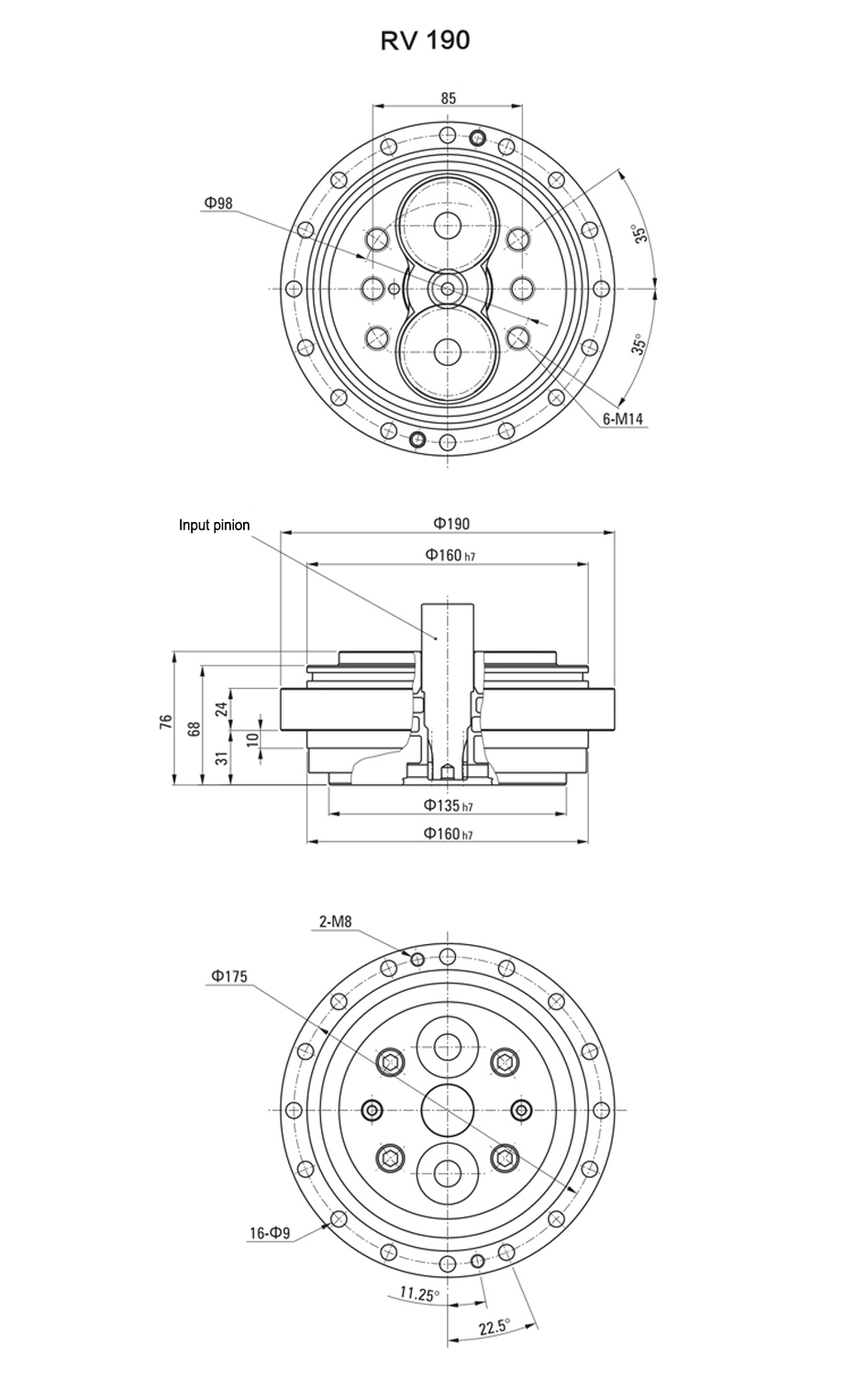
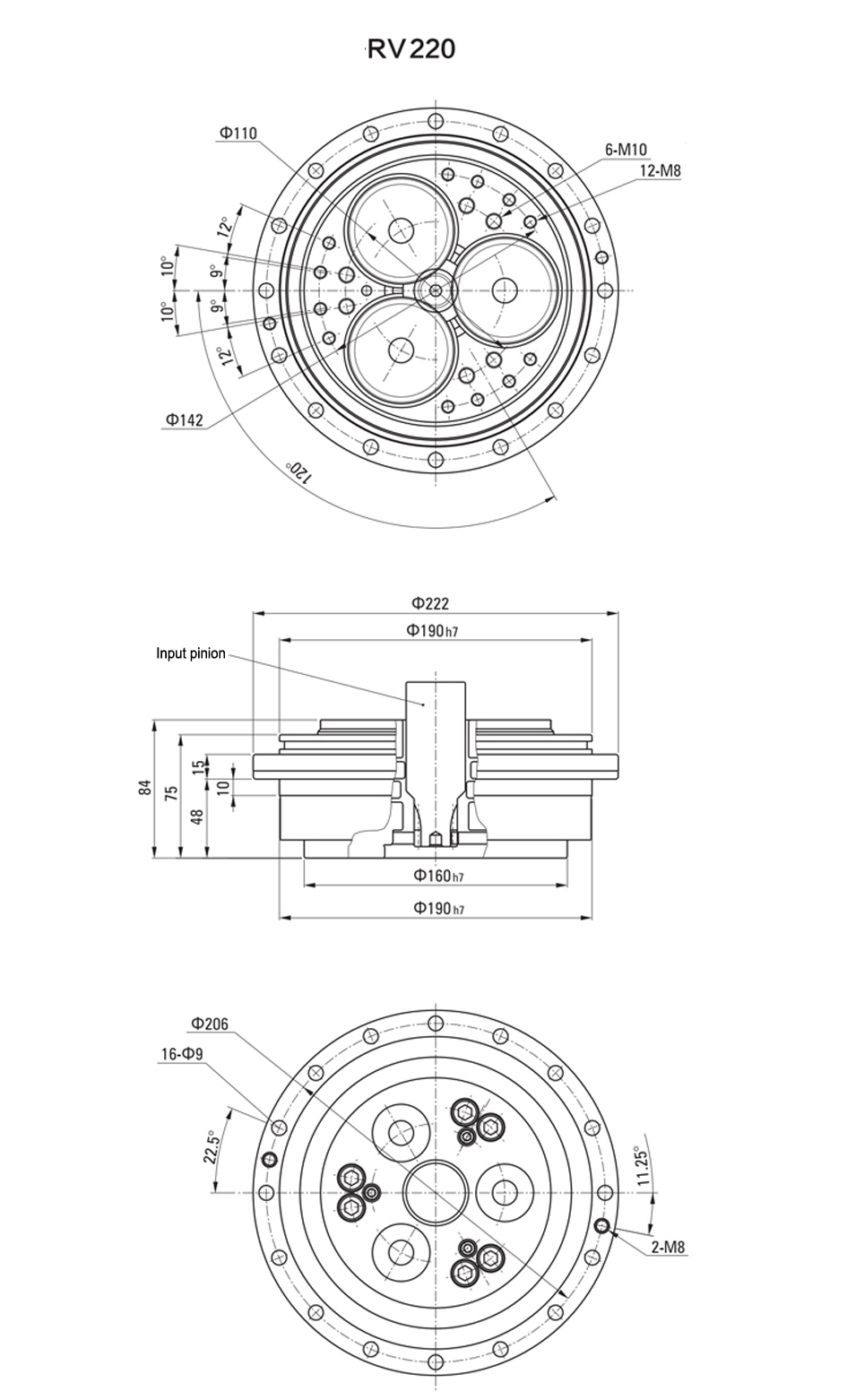
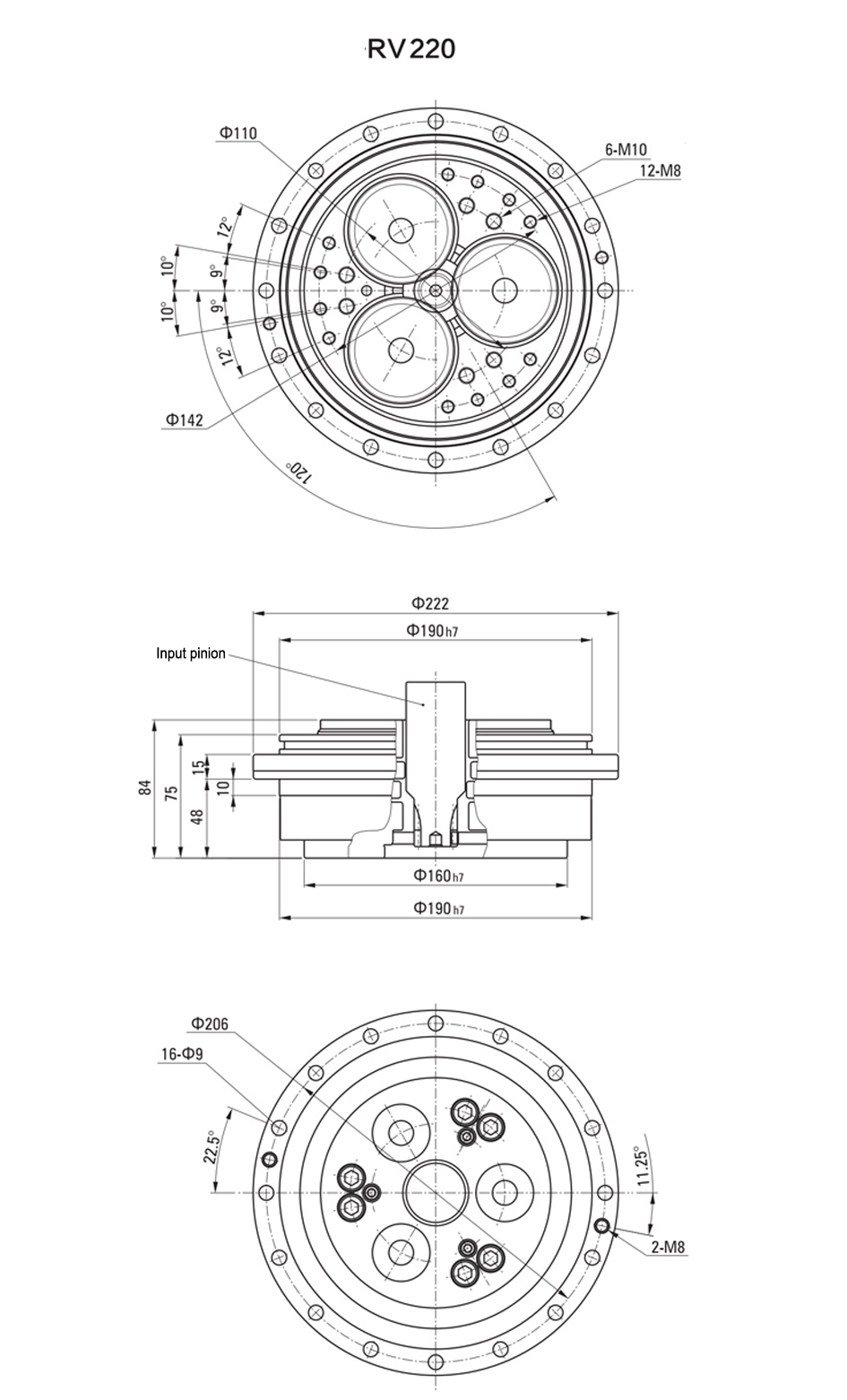
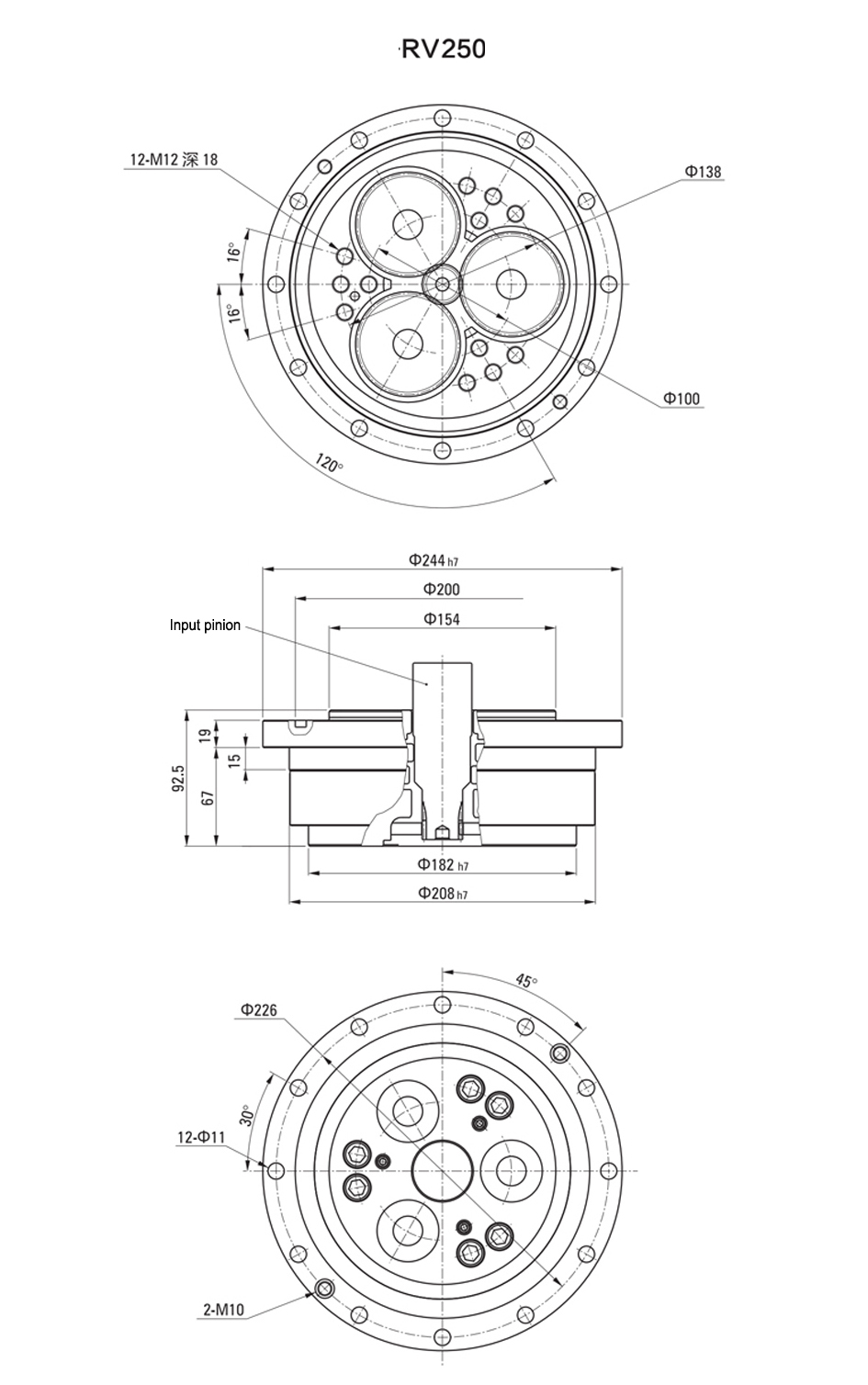
RV120 RV150 RV190 RV220 RV250 RV280
RVE120 RVE150 RVE190 RVE220 RVE250 RVE280
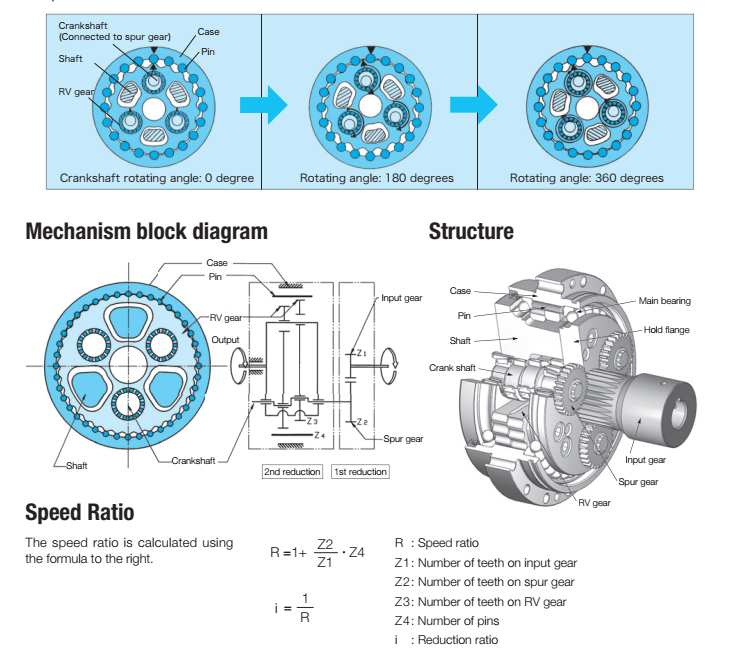
• 1 -ին փուլ Spur հանդերձանքի նվազեցում
Մուտքային հանդերձանքը ներգրավվում և պտտում է պտուտակները, որոնք միացված են լիսեռ լիսեռներին: Փոխանցման մի քանի ընդհանուր հարաբերակցություն կարելի է ապահովել `ընտրելով առաջին փուլի տարբեր հարաբերություններ:
2 -րդ փուլ Epicyclic հանդերձում նվազեցում
• Կռունկ շարժիչներով պտուտակավոր լիսեռները առաջացնում են երկու էպիցիկլիկ շարժակների էքսցենտրիկ շարժում, որոնք կոչվում են RV շարժակներ, որոնք միմյանցից 180 աստիճանով փոխադրվում են `հավասարակշռված բեռ ապահովելու համար:
• RV շարժակների էքսցենտրիկ շարժումը առաջացնում է ցիկլոիդաձև փոխանցման ատամների ներգրավում գլանաձև ձևով կապում, որոնք գտնվում են պատյանի ներքին եզրին մոտ:
• Կռունկների առանցքների մեկ պտույտի ընթացքում RV հանդերձանքի ատամները մեկ պտույտի հեռավորությունը շարժում են պտտվող կռունկների հակառակ ուղղությամբ: RV հանդերձանքի շարժումն այնպիսին է, որ ատամները մնում են սերտ կապի մեջ քորոցների հետ, և մի քանի ատամ միաժամանակ կիսում են բեռը:
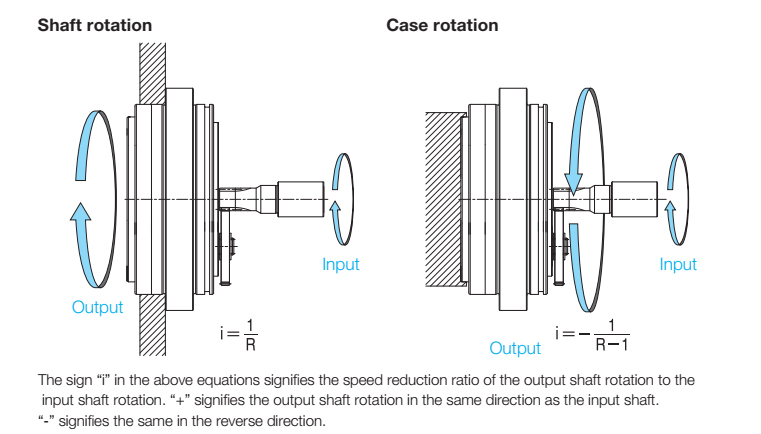
• Ելքը կարող է լինել կամ առանցքը, կամ պատյանը: Եթե գործը ամրագրված է, լիսեռը ելքն է: Եթե լիսեռը ամրագրված է, ապա գործը ելքն է:
Բոլոր փոխանցումատուփերը կարբյուրացված են բարձր բեռով, ցածր աղմուկով, ցածր թրթռումներով, ցածր իներցիայով և երկար կյանքով, բարձր ճշգրտությամբ պտտվող ուղղությամբ ցածր շեղումների համար: Lowածր գին բոլոր կիրառումների համար:
Պտտման ուղղությունը և փոխանցման հարաբերակցությունը
Գնահատական ՝ 41 81 102.17 102.81 107.66 125.21 126 137 156 164.07 141 145.61 161 201 171 75 93 117 139 162 185 81 105 123 144 159 192.75 105 118 142.44 159 183 203.52
Ապրանքի կոդը
Արագության ընդհանուր հարաբերակցությունը i (առաջին և երկրորդ նվազեցման փուլերի) կտարբերվի լիսեռի պտույտի և դեպքի պտույտի միջև և կարող է հաշվարկվել արագության հարաբերակցությունից: